Physics Notes - Herong's Tutorial Notes - v3.24, by Herong Yang
What Is Phase Portrait
This section provides an introduction to Phase Portrait, which is the trajectory curve of a system in the the Phase Space for a given period of time.
What Is Phase Portrait? Phase Portrait is the trajectory curve of a system in the the Phase Space for a given period of time.
For a single-object system with 1 degree of freedom, the Phase Space is a 2 dimensional space of (q1, p1). In this case, the Phase Portrait becomes a 2 dimensional curve.
Phase Portrait of Free Fall Motion
Let's take a look at Phase Portrait of the Free Fall Motion of a single object with mass m. In this case, the generalized position has only 1 component x, representing the height of the object. So we can express Canonical Coordinates (q,p) of the system as below:
q = (x) p = (m*x') # x is the height of the object # m is the mass of the object # x' is the velocity of the object
The Hamilton Function can be expressed as:
H = T + V
or:
H = p*p/(2m) + m*g*q (P.1)
# g is the standard gravity (9.80665)
If we apply Hamilton Equations, we have:
∂H/∂q = -p' (P.2) ∂H/∂p = q' (P.3) or: ∂(p*p/(2m) + m*g*q)/∂q = -p' ∂(p*p/(2m) + m*g*q)/∂p = q' or: m*g = -p' (P.4) p/m = q' (P.5)
Equations P.4 and P.5 are the equations of the free fall motion, which has the following solution:
q(t) = -g*t*t/2 + p0*t + q0 p(t) = -m*g*t + p0 # q0 is the initial position # p0 is the initial momentum
The Phase Portrait of this system is a parabolic curve in the Phase Plane of (q,p). For example, if the system has a initial condition of (q,p) = (0,1), its Phase Portrait will look like this:
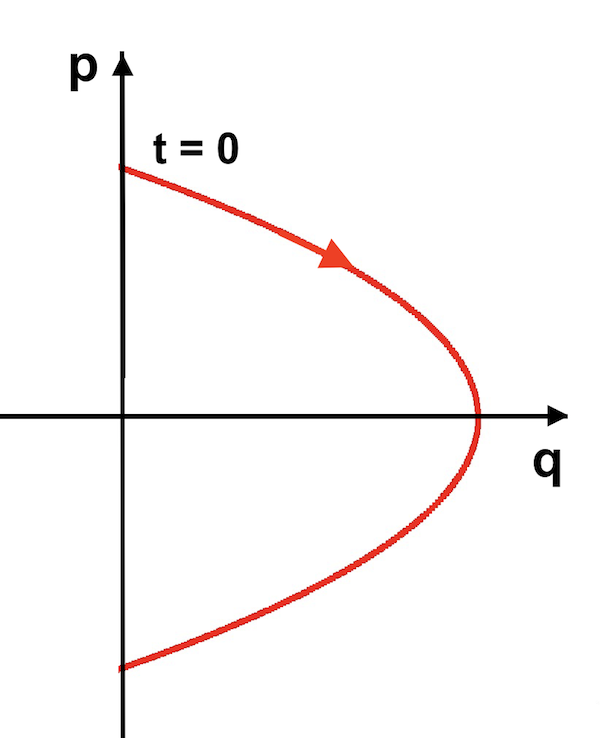
Table of Contents
Introduction of Frame of Reference
Introduction of Special Relativity
Time Dilation in Special Relativity
Length Contraction in Special Relativity
The Relativity of Simultaneity
Minkowski Spacetime and Diagrams
Introduction of Generalized Coordinates
►Phase Space and Phase Portrait
Phase Portrait of Simple Harmonic Motion
Phase Portrait of Pendulum Motion
Motion Equations of Linear Systems