Physics Notes - Herong's Tutorial Notes - v3.25, by Herong Yang
Action - Functional of Position Function x(t)
This section describes the Action S as a functional of position function x(t).
In the last section, we defined a very important concept of a mechanical system, Action S, as the integral of Lagrangian L(t) between two time instances.
S = ∫ L(t)dt between t1 and t2 (G.2)
# L(t) is Lagrangian of the system.
If we consider a system with a single moving object, the position of the object is a function of time, x(t). And its velocity is also a function of time, x'(t). In this case, Lagrangian can also be expressed as a function of t, x(t) and x'(t):
L = L(x,x',t) (G.1) # x, shorthand of x(t), is the position of the object # x', shorthand of x'(t), is the velocity of the object
Of course, in the real physical world, the object will move according to a fixed function x(t) from the starting point x(t1) to the ending point x(t2).
If the position function x(t) is fixed, the velocity function x'(t) is also fixed. So the Lagrangian function depends on a single variable, time t. And the Action S becomes a fixed value.
S = ∫ L(t)dt between t1 and t2 (G.2)
# S is fixed, if x(t) is fixed based on physical laws
However, if the object does not follow any physical law, it can, mathematically, move according to any function x(t) that connects x(t1) and x(t2).
In other words, the object can take any path in spacetime, moving from the starting point x(t1) to the ending point x(t2). For each different path x(t), we will have a different Lagrangian function L(x,x',t).
So mathematically, Action S is not a constant any more. It is a functional of x(t), expressed as:
S = S[x(t)]
or:
S[x(t)] = ∫ L(x,x',t)dt (G.2)
# x(t) is any mathematical function
If the object moves in a straight line, the position function x(t) has only 1 component, represented by x. In this can, we can plot any position function x(t) in 2-dimensional plane of (t,x).
The following diagram shows 3 examples of position functions on the (t,x) plane between two time instances, t1 and t2, they may look: (source: slideplayer.com)
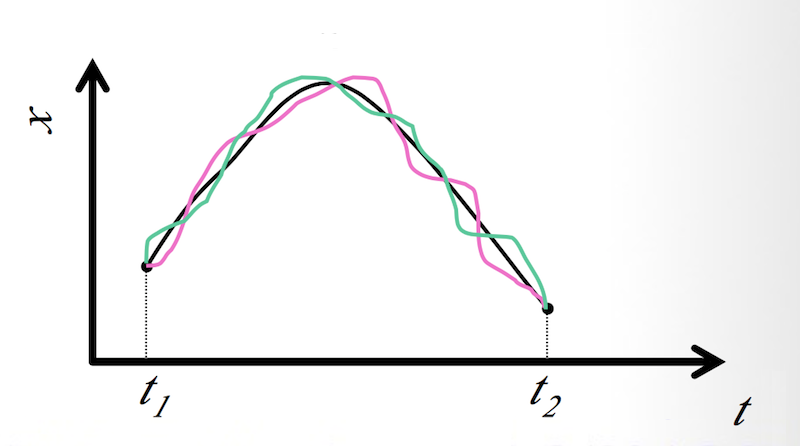
Those 3 position functions are plotted in 3 colors: black, pink and green: xblack, xpink and xgreen, will result 3 Lagrangian functions: Lblack, Lpink and Lgreen.
Lblack(t) = L(xblack,x'black,t) Lpink(t) = L(xpink, x'pink ,t) Lgreen(t) = L(xgreen,x'green,t)
Those 3 Lagrangian functions will then result 3 Action values: Sblack, Spink and Sgreen.
Sblack = ∫ Lblack(t)dt Spink = ∫ Lpink(t)dt Sgreen = ∫ Lgreen(t)dt or: Sblack = S[xblack(t)] Spink = S[xpink(t)] Sgreen = S[xgreen(t)]
Mathematically, there are infinite number of functions x(t) that meet the boundary conditions of the two ending points (t1, x1) and (t2, x2). So S[x(t)] is a functional, a function of functions x(t).
Now we should have a good understanding of what is Action S, and why it is called a functional of x(t).
Table of Contents
Introduction of Frame of Reference
Introduction of Special Relativity
Time Dilation in Special Relativity
Length Contraction in Special Relativity
The Relativity of Simultaneity
Minkowski Spacetime and Diagrams
Action - Integral of Lagrangian
►Action - Functional of Position Function x(t)
Hamilton's Principle - Stationary Action
Other Proofs of the Lagrange Equation
Lagrange Equation on Free Fall Motion
Lagrange Equation on Simple Harmonic Motion
Lagrangian in Cartesian Coordinates
Lagrange Equations in Cartesian Coordinates
Introduction of Generalized Coordinates