Physics Notes - Herong's Tutorial Notes - v3.24, by Herong Yang
Generalized Coordinates and Generalized Velocity
This section provides a quick introduction to the Generalized Coordinates and Generalized Velocity.
What are Generalized Coordinates? Generalized Coordinates are independent functions qi(t), that can be used to represent positions in Cartesian coordinates through a set of transformation functions.
q(t) = (q1(t), q2(t), q3(t))
# Generalized coordinates
r(t) = (rx(t), ry(t), rz(t))
# Cartesian coordinates
r(t) = (r1(q1(t), q2(t), q3(t)),
(r2(q1(t), q2(t), q3(t)),
(r3(q1(t), q2(t), q3(t)))
# r1(), r2(), and r3() are transformation functions
or:
r(t) = r(q(t)) (C.1)
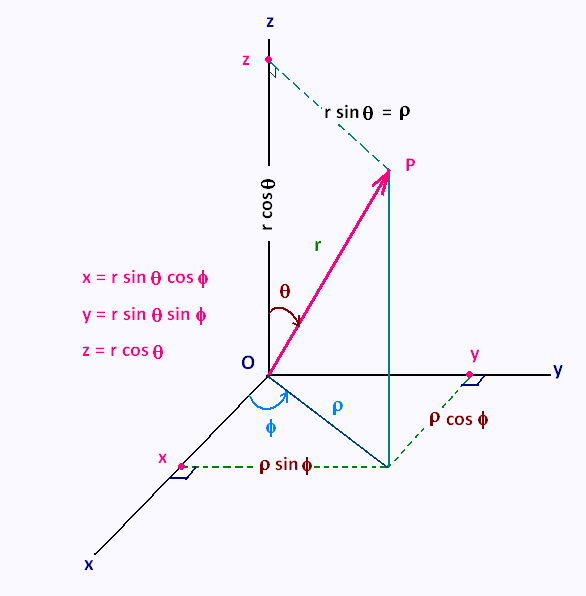
The diagram below shows the spherical coordinates as an example of generalized coordinates (source: quora.com)
What Is Generalized Velocity? Generalized Velocity is a vector of time derivatives of generalized coordinates.
q'(t) = (dq1/dt, dq2/dt, dq3/dt)
The velocity in Cartesian coordinates can be expressed in generalized velocity through transformation functions:
r'(t) = d(r(q(t))) / dt r'(t) = (∑ ∂r1/∂qi * dqi/dt, ∑ ∂r2/∂qi * dqi/dt, ∑ ∂r3/∂qi * dqi/dt) # The chain rule for derivatives applied or: r'(t) = (∂r1/∂q ∙ dq/dt, ∂r2/∂q ∙ dq/dt, ∂r3/∂q ∙ dq/dt) # Dot product operation applied or: r'(t) = ∂r/∂q ∙ dq/dt or: r' = ∂r/∂q ∙ q' (C.2)
Table of Contents
Introduction of Frame of Reference
Introduction of Special Relativity
Time Dilation in Special Relativity
Length Contraction in Special Relativity
The Relativity of Simultaneity
Minkowski Spacetime and Diagrams
►Introduction of Generalized Coordinates
►Generalized Coordinates and Generalized Velocity
Simple Pendulum Motion in Generalized Coordinates
Hamilton's Principle in Generalized Coordinates
Lagrange Equations in Generalized Coordinates
Lagrange Equations on Simple Pendulum
What Is Legendre Transformation
Hamilton Equations in Generalized Coordinates